FV-alignerシリーズは高機能・高精度位置決め用画像処理装置です。画像情報をもとに、ワークを基準位置に合わせ込むためのXYθ補正量を計算し、テーブルの軸制御を行います。特にパネル状ワーク等の位置決めに最適な装置で、3軸テーブルや4軸テーブルを利用した自動位置決めシステムが手間なく簡単に構築できます。また、導入開始から実運用に至るまでの期間を劇的に短縮し、仕様変更でカメラの位置や向き、あるいは軸構成が変更されても装置を変えることなく対応でき、コストを大幅に削減します。
カメラの取り付け方に悩まされない
位置決め計算に悩まされない
テーブル軸構成の制限になやまされない
アラインエンジン FV-aligner-ENG
画像認識から位置合わせに必要な数値(移動量)だけを出力する、画像処理エンジンのみの装置です。軸制御はお客様が自由に操作できます。
アライナー FV-aligner-UNT
画像認識から移動量をパルス数などに換算し、軸制御まですべてを実施する装置です。
座標変換が手間いらず
カメラの取付後または移動後、座標変換係数(カメラ座標をテーブル座標に換算する補正係数)を自動的に取得する自動キャリブレーション機能を持っています。よって面倒なカメラ取付時の合わせ込み(鉛直度やカメラ相互の高さ調整や視野合わせ)が不要になり、またカメラ座標系からテーブル座標系へ変換する複雑な計算をユーザーが意識する必要もありません。これにより例えば段取り変えやワーク品種変更によってカメラ位置を変える必要性が生じた場合でも、数種類のメニューボタンをクリックするだけで自動的にキャリブレーションし、以前と同様のアライメント精度が簡単に復元できます。生産ラインでの品種変更にも手間がかかりません。
カメラの取り付けが手間いらず
1台~4台の範囲なら何台接続しても構いません。※1
カメラは任意の位置に設置でき、それぞれのカメラは適当に回転(360°)していても構いませんし、上向きでも下向きでも構いません。極端な傾きを除き、カメラの光軸は傾いても構いません。※2
カメラごとの視野の大きさが設置位置の高低やレンズの差異により違っていても構いません。
※1 一般的には台数を多くした方が統計効果により高精度化します。
※2 傾きがない場合よりは多少精度は低下します。
光軸の向き不問 |
光軸の傾き不問 |
カメラ設置位置不問 |
カメラの設置が上向きでも下向きでもかまいません。
|
ただし光軸をテーブルに対して垂直に設置した時よりも僅かに精度の低下があります。

|
カメラを任意の位置に設置することが可能です。

|
光軸周りの回転設置不問 |
カメラごとの視野の変化不問 |
カメラ台数不問 |
光軸を中心にカメラを回転設置してもOK。

|
カメラ毎に視野の大きさ(高さ方向のカメラの設置位置、レンズの倍率の差異により)が少々異なっていてもOK。
|
1~4台の範囲なら何台接続してもOK。

|
テーブル軸構成への対応が手間いらず
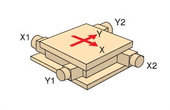
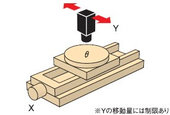
座標軸の構成・向き・回転を問わず、様々な座標軸構成のテーブルに対応しています。座標軸の向きや回転方向にも自動的に対処し、XYの座標軸が多少斜交していても内部計算で補正することが可能です(直交している場合よりは精度は低下します)。
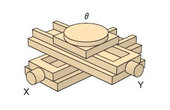
近年、大型LCDパネルやPDPが登場していますが、3軸では負荷が大きいため4軸テーブル(XY方向それぞれに平行2軸を同一平面に配置してXYθ動作を実現するテーブル)を使用するシーンが多くなりました。FV-alignerは4軸テーブルをスムーズにモーション制御するアルゴリズムを搭載し、大型パネル等の位置決めにも対応します。
|
|
|
XYθ |
θXY |
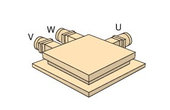
UVW |
|
|
|
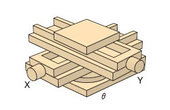
X1X2Y1Y2(4軸テーブル) |
Xθ+Y(カメラ) |
|
FV-aligner応用例
| 部品実装 |
ピッキング |
特性検査(LCD点灯検査など) |
| 部品切断(ウェハ、セラミック、ガラスなど) |
貼り合わせ(LCD,FPCなど) |
印刷(スクリーン印刷など) |
| 露光機(LCD,PCBなど) |
穴空け機(PCB,シートなど) |
貼り付け(TAB,ACFテープなど) |
FV-alignerハードウエア仕様
|
アラインエンジン
FV-aligner-ENG
アライナーユニット
FV-aligner-UNT
共通仕様
|
映像入力 |
分解能 |
680×480画素×8ビット(256階調) |
|
映像入力チャネル数 |
4チャネル(12pinコネクタ) |
|
入力信号 |
1.0Vp-p/75Ω
コンポジットビデオ(Progressive Scan, EIA-170) |
|
水平/垂直同期信号周波数 |
15.734KHz/59.94Hz(2:1インターレース) |
|
映像出力 |
表示映像出力 |
VGA 1チャネル |
|
解像度 |
800 x 600 |
|
標準I/F |
EIA-232(RS232C) |
チャネル数 |
1チャネル |
|
転送スピード |
1,200~115,200bps |
|
データビット長等 |
データ長、パリティ、ストップビット長→すべて可変 |
|
フォトカプラ絶縁型I/O |
入力32点、出力32点、割り込み入力1点 |
|
一般事項 |
仕様プロセッサ |
Intel Pentium M 1.4GHz |
|
メインメモリ |
標準1GB |
|
ファイル装置 |
システム用CF カード及び
データ用CF カード2枚 |
|
外形寸法(突起部含まず) |
183(横幅)×140(奥行き)×157.38(高さ)mm (UNT) |
| 183(横幅)×140(奥行き)×140.50(高さ)mm (ENG) |
| ゴム足(高さ)6mm |
|
重量 |
約3.2kg (UNT) |
|
電源 |
AC100V~240V |
電源周波数 |
50/60Hz |
消費電力 |
200VA以下 |
|
動作周囲温度 |
0~40℃ |
|
動作周囲湿度 |
30~85%RH(結露の無いこと) |
|
保存周囲温度 |
-20℃~60℃ |
保存周囲湿度 |
95%RH以下 |
供給体制 |
概ね2年 |
|
その他 |
マウス |
PS/2仕様 |
| 漢字表示 |
JIS第一水準漢字フォント |
|
アライナー
FV-aligner-UNT
固有仕様 |
軸制御入力 |
入力形式 |
フォトカプラ絶縁型入力 外部電源DC24V、5mA~10mA以上 |
|
信号内容 |
原点、原点近傍、Z相、オーバーリミット、即時停止、
位置決め完了信号、ドライバ異常 |
|
軸制御出力 |
出力形式 |
オープンコレクタ出力(MAX80mA) |
|
信号内容 |
サーボオン、カウンタクリア、方向切替え/パルスの組み合わせ
パルス駆動[CW(正転),パルス/(反転)、パルスの組み合わせ |
|
最高速パルス数 |
4.9MPPS(市販ステッピングモータ/サーボモータの殆どに対応可能) | |
※メガピクセルの高分解能カメラが接続できる装置も用意しています。営業部までお問合せください。
※ハードウェア仕様は今後変更される場合があります。